fr_campus
Downloadimage file (1.111Mb)
{kind=link}
Additional downloads
Terms of use
Metadata
Show full item recordDescription
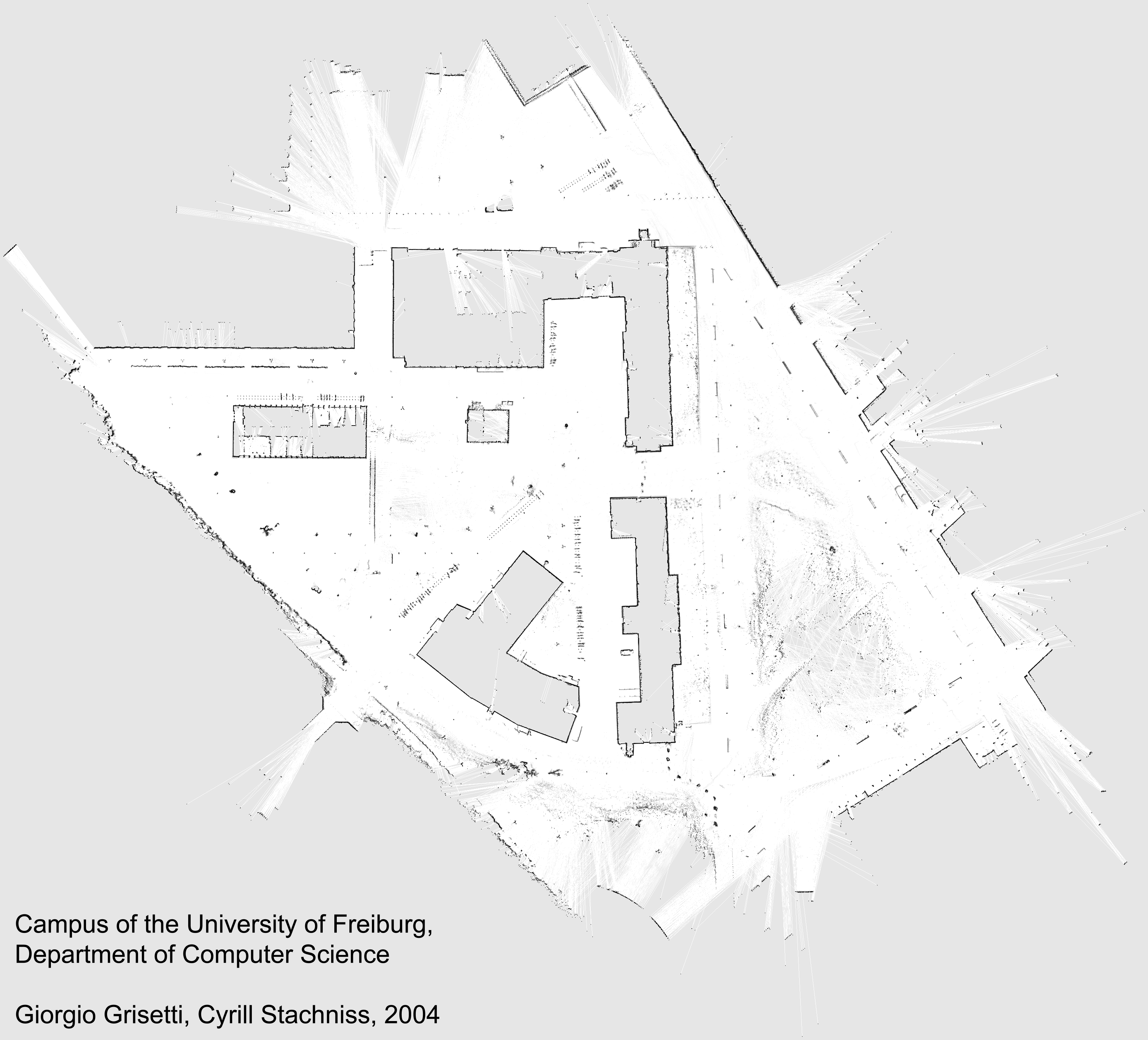
log-file: fr-campus-20040714.carmen.log format : raw robot data file in the carmen logger format (ODOM, FLASER, PARAM) robot : Pioneer2AT (herbert) with one SICK LMS291-S05 (FLASER) date : 14 July 2004 place : campus of the Department of Computer Science, Univ of Freiburg size : approx. 250m x 250m, robot traveled 1.750km (~ 1.088 miles) creators: Cyrill Stachniss & Giorgio Grisetti map(s) : carmen-map-files: fr_campus_100p_10cm.cmf - 100 particles, 10cm grid resolution fr_campus_100p_30cm.cmf - 100 particles, 30cm grid resolution fr_campus_30p_10cm.cmf - 30 particles, 10cm grid resolution fr_campus_30p_30cm.cmf - 30 particles, 30cm grid resolution image-files: fr_campus_100p_10cm.png fr_campus_100p_30cm.png fr_campus_100p_30cm_path.png (including the path of the robot) fr_campus_30p_10cm.png fr_campus_30p_30cm.png The maps have been created with Giorgio Grisetti's great Rao-Blackwellized mapper. For more information see: Cyrill Stachniss, Giorgio Grisetti, Dirk Haehnel, and Wolfram Burgard. "Improved Rao-Blackwellized Mapping by Adaptive Techniques and Active Loop-Closure" (SOAVE04, SelfOrganization of AdaptiVE behavior 04). We generated the maps with two different particle sets. The first map was computed with 100 particles which produces really nice results. Due to Giorgio's optimization he is able to build the map with only 30(!) particles and the result is nearly as good as the one 100 particles. comments: This is an outdoor data-set with some moving objects (cars people, bikes), with some trees, bushes, a lot of free space and of course not 100% plain surfaces....
Date issued
2010-12-07Keywords
SICK LMS laser range finder, Outdoor sensor data, 2D sensor data