2.003 Modeling Dynamics and Control I, Spring 2002
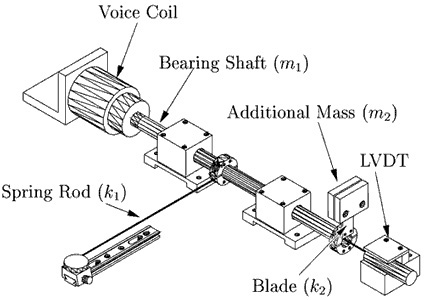
Fourth order lab system, illustration of complex zeros and modes of mechanical systems. (Image courtesy of Prof. David Trumper, Lab 8.)
Highlights of this Course
Course Description
This course is the first of a two term sequence in modeling, analysis and control of dynamic systems. Mechanical translation, uniaxial rotation, electrical circuits and their coupling via levers, gears and electro-mechanical devices. Analytical and computational solution of linear differential equations and state-determined systems. Laplace transforms, transfer functions. Frequency response, Bode plots. Vibrations, modal analysis. Open- and closed-loop control, instability. Time-domain controller design, introduction to frequency-domain control design techniques. Case studies of engineering applications.
Technical Requirements
QuickTime® Player software is required to view the .mov files found on this course site.