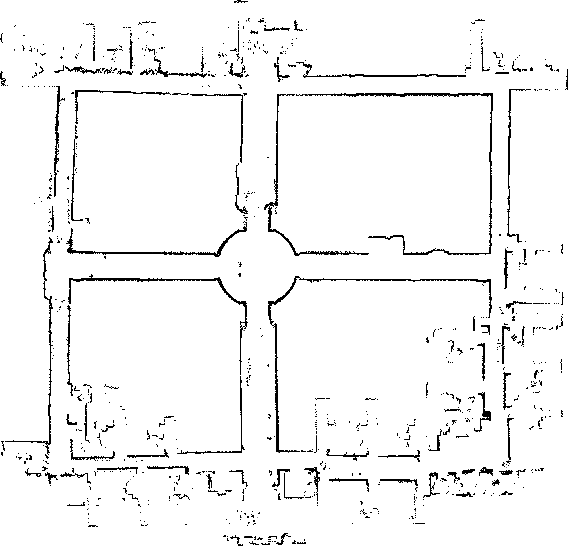
| dc.description | 3rd floor of ACES building on UT Austin campus. The environment is basically a square with a cross that divides it into 4 smaller squares. The exploration first takes the outer loop, then divides the loop into 2 rectangles, then goes back to the middle and divides it again into the 4 squares. Robot performs autonomous midline following, rotates around at intersections for our topological implementations. The outer square is ~40 meters across. Max laser reading is 50 meters (anything over 49.5 is maxed out). Robot is an IRobot Magellan Pro. Action model of our robot has been experimentally validated as a Gaussian with mean (0,0,0). Sigmas are as follows: For every 1 meter forward, sigma_forawrd=0.4 For every 1 meter forward, sigma_normal=0.2 For every radian turned, sigma_rotate=0.8 | en_US |