Increasing autonomy of UAVs
DownloadHow_Increasing-Autonomy-of-UAVs.pdf (884.4Kb)
PUBLISHER_POLICY
Publisher Policy
Article is made available in accordance with the publisher's policy and may be subject to US copyright law. Please refer to the publisher's site for terms of use.
Terms of use
Metadata
Show full item recordAbstract
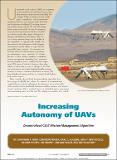
This article has presented a tightly integrated systems architecture for a decentralized CSAT mission management algorithm and demonstrated successful implementation in actual hardware flight tests. This CSAT architecture allows each UAV to accomplish a combined search and track mission by conceptualizing the searching aspect as a spare time strategy to be executed optimally over a short time horizon when the agents are not actively tracking a vehicle. This presented a balance between the two conflicting search and track modes and allowed the mission to achieve more than simply searching or tracking alone.
Date issued
2009-06Department
Massachusetts Institute of Technology. Computer Science and Artificial Intelligence Laboratory; Massachusetts Institute of Technology. Department of Aeronautics and Astronautics; Massachusetts Institute of Technology. Department of Electrical Engineering and Computer ScienceJournal
IEEE Robotics and Automation Magazine
Publisher
Institute of Electrical and Electronics Engineers
Citation
How, J.P. et al. “Increasing autonomy of UAVs.” Robotics & Automation Magazine, IEEE 16.2 (2009): 43-51. © 2009 Institute of Electrical and Electronics Engineers
Version: Final published version
ISSN
1070-9932